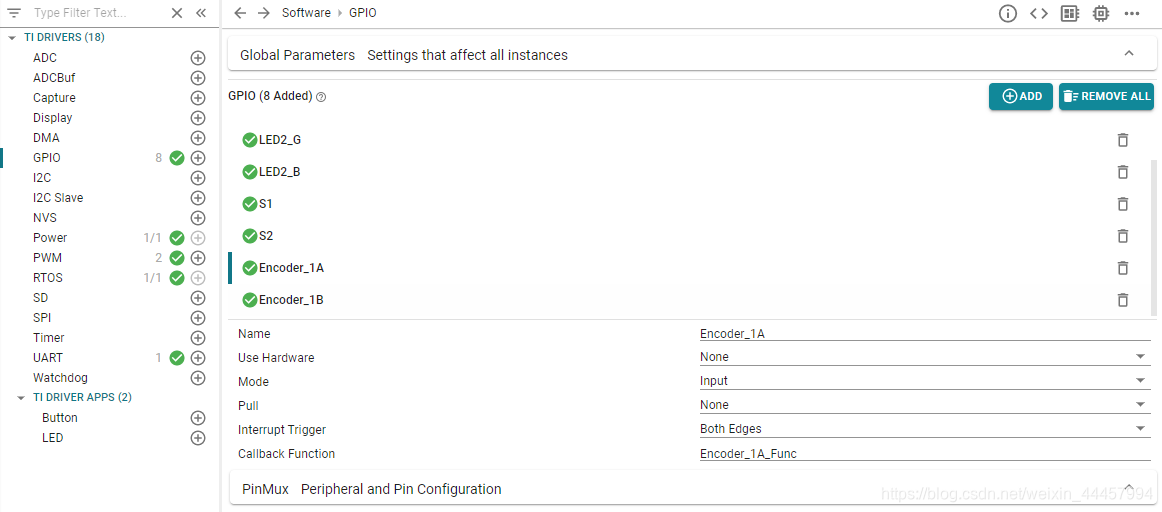
基于TI drivers库函数,实现编码器电机定速、定角控制示例
”MSP432P401R 电赛 PID 编码器 MSP430“ 的搜索结果
【代码】MSP432P401R 速成(电赛必备)
2、基于定时器的四路编码器脉冲捕获; 3、IIC读取陀螺仪(JY901S)的角度信息; 4、驱动OLED显示; 5、三个串口,包括打印字符以及和其他单片机(K210、openmv)通信; 6、定时中断PID控速; 7、PID控角,偏转后自己...

使用TI的MSP432P401R实现遥感小车
工作过程:参赛者手动将小车摆放在药房处(车头投影在门口区域内,面向病房),手持数字标号纸张由小车识别病房号,将约200g药品一次性装载到送药小车上:小车检测到药品装载完成后自动开始运送;小车根据走廊上的标识...
赛题分析 通过对赛题的分析研究,要完成题目需要满足以下几点要求: 1)实现小车的自动寻迹功能。题目要求小车需要沿着标记线自动行驶,到达目标位置时,需要...4)利用TI的MSP430/MSP432 平台,设计制作一个四轮电动小

该篇以电机控速为例展开分析,假如你手上有一个编码器电机,其余配件若干,请你运用PID算法相关知识设计出一套完整的反馈路线。 相信大家最常用的设计路线是用定时器,那么这里我就以定时器来构思反馈路线。 1. ...


MSP430f5529利用测频法测量编码器电机速度
基于MSP430f5529 编码电机测速 接收脉冲数 PWM调速 CCS编译器 代码分析
介绍了以一种超低功耗16位混合信号单片机MSP430F449作为核心控制芯片,光电编码器检测直流电机转速构成速度反馈,MSP430F449的定时器生成PWM,应用功率驱动芯片L298N构成驱动电路,采用PID控制算法,实现了直流电动机转速...
为了使测距不受温度影响,用温度传感器实时检测小车周围环境的温度并修正距离计算公式的参数,采用光电编码器来检测小车的速度,运用PID控制算法和PWM来控制小车的精确稳定的运行,从而达到预期的设计目标。
本文最终使用MSP432P401r开发板实践驱动TB6612带稳压电机驱动模块驱动电机,主要学习的有以下三个模块:TB6612带稳压电机驱动模块、MG310电机的编程使用,霍尔编码器的基础知识,文章前部分会先介绍各个模块基础,...
为了使测距不受温度影响,用温度传感器实时检测小车周围环境的温度并修正距离计算公式的参数,采用光电编码器来检测小车的速度,运用PID控制算法和PWM来控制小车的精确稳定的运行,从而达到预期的设计目标。...

msp430f5529是一款微控制器,而编码器电机PID算法是一个用于控制电机转速的算法。在msp430f5529上实现编码器电机PID算法的步骤如下: 1. 配置ADC模块:通过ADC模块获取电机转速的反馈信号。 2. 配置定时器模块:...
以下是一个基于 MSP430F5529 的 PID 控制 520 编码器电机的示例代码。该代码使用 TI 的 CCS 编译器和 MSP430Ware 库,可以通过调整 PID 参数来改进电机控制性能。 ```C #include <msp430.h> #include #include #...
* MSP432E401Y * Description:本函数实现定时和测速功能 * 引脚:PD0-&gt;编码器输入信号 * * Author: Robin.J ***************************************************************************/ /* ...
以下是一个基本的 MSP430F5529 控制编码器电机的 PID 代码。请注意,这只是一个示例代码,您需要根据您的具体应用要求进行适当的修改。 ```c #include <msp430.h> #include /* 定义编码器相关参数 */ #define PPR...
对于MSP432爬坡小车的PID控制,你可以按照以下步骤进行实现: 1. 传感器数据获取:首先,你需要使用合适的传感器(例如编码器或惯性测量单元)来获取小车的位置和姿态信息。 2. 设定目标值:根据你的需求,设置一...
一边学习,一边记录,有踩坑,有试错,有经验。
后续会持续更新我的学习日常,既是对自己学习的记录,也可以方便需要的小伙伴!
根据提供的引用内容,msp430f5529pid可能是指msp430f5529单片机的PID控制器。然而,根据提供的引用内容,无法确定具体的PID控制器实现细节。如果您有关于msp430f5529pid的更多信息或具体问题,请提供更多的上下文和...
MSP430F5529是一款微控制器,用于嵌入式系统的开发。在使用MSP430F5529进行PID算法实现时,可以参考以下步骤: 1. 首先,根据赛题要求和开发板的限制,仔细阅读赛题要求并记录所需的模块和引脚使用情况。根据引用\...
首先,你需要将速度传感器(如编码器)连接到MSP430的输入引脚。然后,使用MSP430的定时器模块来测量速度,并将测量值馈送到PID控制器。 在PID控制器中,你需要设置三个参数:比例增益(Kp)、积分时间(Ti)和微分...
推荐文章
- Android 插件化-程序员宅基地
- 最新阿里内推 Java 后端面试题_索引会不会使插入、删除作效率变低,怎么解决?-程序员宅基地
- Redis实现延迟队列方法介绍-程序员宅基地
- Python入门实战:Python的文件操作-程序员宅基地
- 机器学习模型对比_机器学习的模型比较-程序员宅基地
- 纯C语言完整代码操作单链表(初始化、插入、删除、查找...)-程序员宅基地
- 实战打靶集锦-027-SoSimple1_sosimple 写入试验场-程序员宅基地
- 用opencv的dnn模块做yolov5目标检测_opencv yolov5-程序员宅基地
- 3的倍数(暴力搜索)_3的倍数csdn-程序员宅基地
- 【腾讯优测干货分享】如何降低App的待机内存(二)——规范测试流程及常见问题...-程序员宅基地